


Route Optimization API
Optimize routing, task allocation and dispatch
Distance Matrix API
Calculate accurate ETAs, distances and directions
Directions API
Compute routes between two locations
Navigation API & SDK
Turn by Turn Instructions for Drivers & Technicians
Route Optimization Software
Plan optimized routes with 50+ Constraints
Product Demos
See NextBillion.ai APIs & SDKs In action
AI Route Optimization
Learns from Your Fleet’s Past Performance
Platform Overview
Learn about how Nextbillion.ai's platform is designed
Road Editor App
Private Routing Preferences For Custom Routing
On-Premise Deployments
Take Full Control of Your Maps and Routing
About Us
Our story, vision
and mission
Contact Us
Reach out to us for any product- or media-related queries
Write to us at

Table of Contents
Are mapping APIs really optimizing your delivery routes, or are they simply drawing the fastest lines on a map? Most teams believe that the optimization has already taken place as soon as a route is created using a mapping API. Initial outcomes tend to support this assumption. Routes seem to be efficient, ETAs seem to be correct, and drivers arrive at their destinations without inconvenience. However, with the increase in the number of deliveries, the number of stops also increases, and operational regulations become stricter. The same routes start to require manual corrections, close monitoring, and last-minute changes. This initially seems to be automated optimization, but as time goes by it turns out to be simple navigation, with the complexity of planning remaining unsolved.
Continue to know whether mapping APIs are indeed route optimization engines as they claim to be, the limits of their ability, and the difference between route optimization and navigation as delivery operations grow large.
Route optimization in delivery operations is a planning process rather than a navigation option, focused on designing routes that are operationally viable, cost-effective, and compliant before vehicles are dispatched. Unlike navigation, which determines how a vehicle moves between two points, route optimization determines whether a route should exist at all and how delivery work should be distributed across the fleet. It operates upstream of navigation by making decisions about stop assignment, stop sequencing, and scheduling while accounting for operational rules.

Here is what mapping APIs are fundamentally designed to do: provide fast, stateless route computation and real-time navigation between geographic points, optimizing on-road execution rather than delivery planning or operational decision making.
Mapping and navigation APIs are engineered to deliver rapid, deterministic route calculations between geographic coordinates using digital representations of road networks. They are mainly used to convert spatial data to driving instructions that can be executed with the least amount of latency. These systems are stateless processing, horizontal scaling, and fast graph traversal optimized in order to handle high request volumes.
Architectural choices give more preference to responsiveness and throughput and, as such, permit real-time navigation at the global scale. As a trade-off, they limit the depth of reasoning used to plan logic, evaluate constraints, or coordinate fleets.
Single-origin to single-destination routing is the fundamental routing model implemented by mapping APIs. Routes are calculated based on graph-based shortest-path algorithms like Dijkstra or A*, with the weights of the edges being dynamically adjusted based on live traffic signals, historic speed profiles, and incident data.
The estimated arrival times are re-calculated on a continuous basis as the traffic conditions vary. The calculations of each route assume the independence of trips. The routing engine does not consider other simultaneous routes, common vehicle resources, and downstream operational dependencies that occur during delivery operations.
Mapping APIs are more detailed execution-layer support systems that transform the calculated paths into turn-by-turn navigation instructions. This consists of lane-level assistance, maneuver cues, and constant positioning monitoring to ensure route compliance.
Rerouting mechanisms are used to react to congestion, accidents, and road closures by recalculating alternative routes that incur minimum additional travel time. These capabilities optimize driving efficiency and situational responsiveness during execution, but they operate after route structure and stop assignments have already been determined outside the system.
Mapping APIs have routing services that are deliberately stateless, and each request is independently evaluated without prior or parallel knowledge of previous or parallel routing decisions. There is no consistent display of vehicle capacity utilisation, stop sequencing, driver schedules, and route history. This architecture allows fast calculation and elastic scaling between distributed systems, but it does not allow the API to have a common operational context.
Consequently, the mapping APIs are unable to make decisions based on inter-route dependencies, impose planning continuity, or optimize decisions based on many vehicles or planning cycles.
Mapping APIs do not optimize routes automatically, since optimization is not an architectural concern of the APIs. Such systems are not meant to solve multi-vehicle, multi-stop, multi-time, multi-cost, and multi-compliance planning problems, but rather to answer isolated routing queries fast and at scale. Their design decisions put them in favor of stateless execution, low latency, and simplicity, which in turn directly constrain their capability to do holistic, constraint-aware optimization.
Optimization involves the need for a planning layer that can analyze a combination of routes, vehicles, and constraints prior to the start of execution. Mapping APIs do not have this layer. They are request-response mechanisms where routes are calculated independently. There is no shared state, no history, or knowledge of concurrent choices. This makes them very effective in navigation, but structurally unable to reason over the whole operation of a delivery.
The objective functions used by mapping APIs are limited to travel efficiency metrics such as shortest distance or fastest time. These are navigation goals, but not delivery planning goals. The routing logic does not involve cost efficiency, service level compliance, risk exposure, or trade-offs in operations. Consequently, a path can be an ideal one based on the driving factor, and not ideal or impractical based on the business factor.
All paths created by a mapping API are scheduled separately. The fleet is not represented in a common way so that the system can comprehend the impact of one route on the other. There is no coordination of vehicles, an imbalance in workloads, and optimization of depots as a single system. The absence of a global perspective prevents the total fleet miles reduction, the equalization of the labor efforts, and the maximization of the resource use among the various vehicles.
Mapping APIs do not encode business-specific rules that define the success of delivery. Routing decisions do not reflect customer delivery windows, priority orders, contractual service-level agreements, and penalty thresholds. The system is unable to differentiate between important and non-important deliveries, and it is unable to predict the effect of delays or missed promises. Exceptions and penalties are addressed in a reactive way by human beings instead of proactively by the routing logic.
Because mapping APIs do not assign stops or design routes, humans are forced to perform these tasks manually. Before navigation can start, the planners have to determine what stops they are going to have on which vehicle and in what sequence. This manual process is prone to errors, and as the volume of delivery increases, it becomes time-consuming. Time planning becomes non-linear as the scale increases, and inconsistencies, missed constraints, and operational failures become more common.
Overall, mapping APIs are highly effective at implementing already existing routes, but they fail to generate efficient delivery plans. Lack of planning intelligence, fleet-wide context, and business rule awareness is the reason why route optimization should be addressed by specific optimization systems instead of navigation APIs.
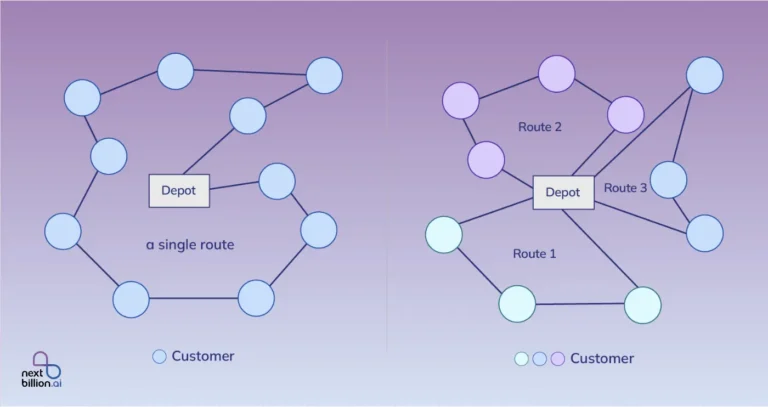
Here are common reasons why multi-stop routing is often mistaken for true route optimization:
Multi-stop routing just uses navigation logic on more than two destinations. The system calculates an order of visits, yet it does not make any reasoning about the existence of the route in the first place. No analysis is done on capacity constraints, service constraints, or downstream impact, and this keeps the problem squarely in the realms of navigation and not optimization.
Most multi-stop routing relies on greedy or distance-based heuristics to reduce travel length or time. These heuristics are not a formal optimization problem with conflicting goals and limitations. Consequently, the result is a convenient progression, rather than a decision that has been confirmed with respect to operational needs.
Optimization requires explicit constraint resolution. Multi-stop routing cannot resolve issues of constraints like delivery windows, vehicle capacity, driver hours, depot cutoffs, or priority commitments. Failure to observe constraints in the planning process results in violations appearing later in the execution process, where they are costly and difficult to rectify.
A multi-stop route may seem efficient on its own, but cause inefficiencies in the overall operation. Local improvements can cause global inequality in the workload, cost, and reliability of a service without taking into account the interaction between vehicles, routes, and shared resources.
Multi-stop routing assumes that any generated sequence is executable. Optimization systems must prove feasibility before execution begins. Without feasibility checks, routes may look valid on a map but fail when exposed to real-world constraints such as time pressure, limited capacity, or regulatory limits.
True optimization produces a plan that balances constraints, objectives, and trade-offs across the operation. Multi-stop routing generates a series of stops. The misunderstanding of a sequence and decision is that by adding stops to a route, it is automatically optimized.
Consider a last-mile delivery operation required to complete between 20 and 30 stops within a single working day. The operation uses multiple vehicles, each with a fixed carrying capacity defined by weight, volume, or package count. Several customers specify strict delivery windows that must be respected to avoid failed deliveries or penalties. Drivers are also subject to legal working hour limits and mandatory breaks. The planning task involves not only identifying drivable paths, but also deciding which stops should be served by which vehicle, in what sequence, and at what time, while remaining within capacity and labor constraints.
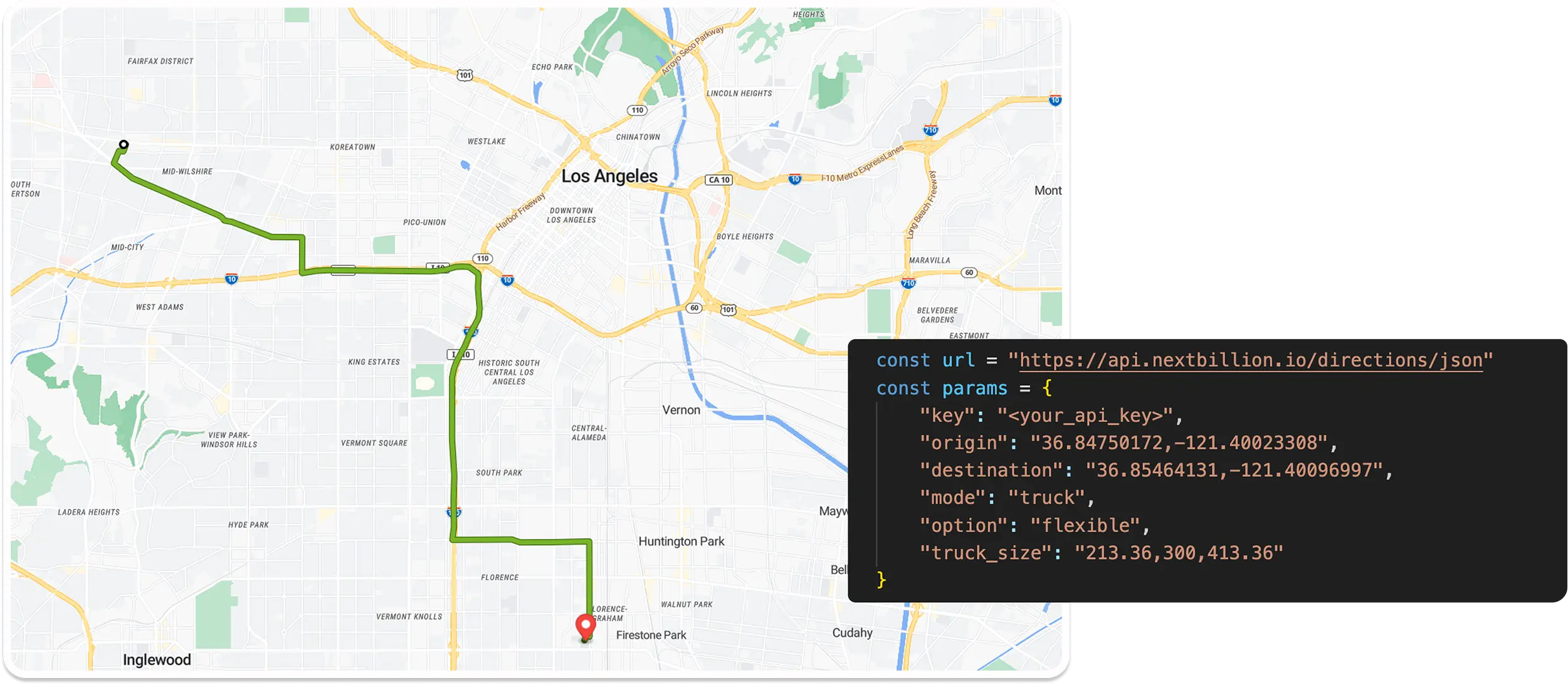
Once stops have already been manually assigned to specific vehicles and ordered into a tentative route, a mapping API performs effectively at the execution layer. It calculates turn-by-turn navigation between consecutive stops using road network graphs and real-time traffic data. Estimated times of arrival are continuously updated based on live congestion, incidents, and historical speed profiles. When disruptions such as accidents or road closures occur, the API can dynamically reroute drivers to minimize delay, improving on-road efficiency without requiring driver intervention.
A mapping API does not participate in the upstream planning decisions that define whether a route is operationally viable. It cannot assign stops across multiple vehicles based on remaining capacity, delivery urgency, or driver availability. Capacity constraints and customer time windows are not evaluated together, which means routes can appear efficient on a map while being infeasible in practice.
Workloads cannot be balanced across vehicles, leading to some drivers being overloaded while others are underutilized. Driver hour limits and compliance rules are not enforced during planning, making it impossible to guarantee that routes are legally executable before dispatch. In this scenario, the mapping API supports route execution, but the responsibility for feasibility, compliance, and optimization remains manual, fragmented, and error-prone.
The route optimization software is a decision engine that is overlaid on top of navigation. It makes routing more of a system-level planning operation than a path-finding one. Whereas navigation APIs are used to compute the path to follow between points, optimization engines are used to determine the structure of delivery work to be taken across vehicles, depots, stops, time, and constraints, and then execution starts. This division permits optimization to reason about combinatorial possibilities and trade-offs, which are not within the scope of evaluation of navigation systems.
Here is how route optimization software goes beyond mapping APIs:
Constraint-based optimization directly translates real-world operational constraints into the planning model. Vehicle capacity takes into consideration weight, volume, pallet placement, and compartment regulations. Time-based constraints model the service time, loading and unloading time, and customer availability time.
Policy constraints impose internal policies like a limit on the number of stops on a route, optimal service sequences, or limited delivery areas. Planning is followed by the strategy of feasibility-first, i.e. a route is created only when all constraints are met at the same time, and then routes that appear efficient on a map are not created but fail to work in practice.
Example: A vehicle with remaining volume but exceeded weight capacity will not be assigned additional stops, even if the location is nearby, preventing mid-route overload failures.
Optimization engines maintain a global view of the fleet rather than optimizing routes independently. Multi-vehicle and multi-depot planning assesses all the vehicles, drivers, and operating bases as one system. Stop assignments are optimized to minimize the total fleet miles, deadhead travel, and depot alignment. Workload balancing allocates the driving time, number of stops, and service work equally, decreasing overtime, fuel usage, and driver fatigue, and enhancing the use of assets.
Example: Instead of two vehicles crossing service territories, the optimizer reassigns stops so each vehicle serves a compact zone from the nearest depot, reducing total distance driven.
Route optimization incorporates customer delivery windows, order priorities, and contractual service-level agreements directly into scheduling decisions. The calculation of arrival times is based on both the travel time and service time, and buffers are added to accommodate variability. The optimizer sequence halts to fulfill commitments in a predictable manner, thus minimizing early arrivals, which result in idle time, and late arrivals, which result in penalties.
Example: High-priority medical deliveries with narrow time windows are scheduled earlier in the route, while flexible commercial drops are sequenced later, protecting SLA compliance without increasing route length.
The process of optimization does not cease at dispatch. Dynamic re-optimization is an ongoing monitoring of the execution and recalculation of routes in case of a change in conditions. Traffic congestion, vehicle failure, unsuccessful deliveries, cancellations, and insertion of new orders are checked against current constraints prior to implementation of changes. This guarantees that any updates are not in violation of capacity constraints, driver hours, and delivery promises, and that the general integrity of the route is maintained throughout the day.
Example: When a new urgent order is added mid-route, the system inserts it into the most feasible vehicle route without pushing any driver beyond legal working hours.
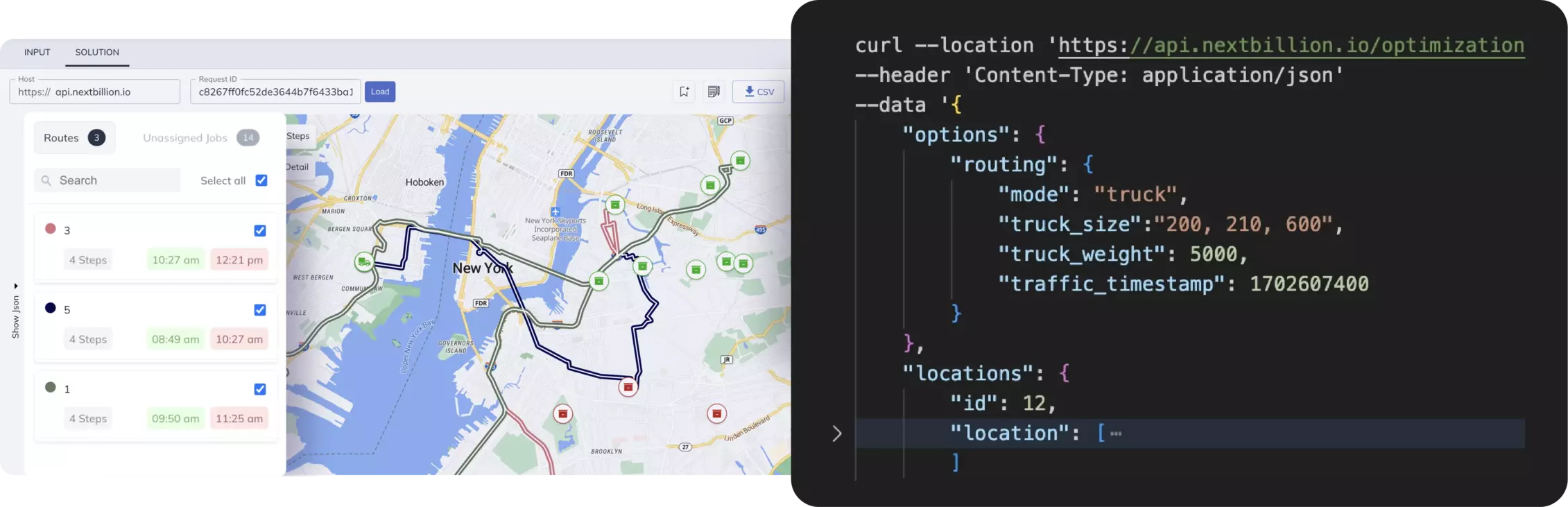
Contemporary delivery stacks are purposely built with the combination of optimization engines and navigation APIs. Optimization engines offer planning information by creating schedules, stop assignments, and routes that are constraint-aware. The navigation APIs are then used as execution platforms, transforming the optimized routes into turn-by-turn directions and real-time traffic awareness. This stratified structure enables every system to work in its area of strength.
Common implementations combine navigation services such as Google Maps, Mapbox, or HERE Technologies with optimization platforms like NextBillion.ai, where optimization outputs feed directly into navigation for driver execution.
When the complexity of routing is low, a mapping API is all that is needed. This usually works with single-vehicle operations, extremely low stop density, and non-delivery window, non-compliance, and capacity-based scenarios. Manual stop assignment is still controllable, and the main operational need is the accuracy of navigation.
Example: When a local technician is visiting two or three customer sites in one day with flexible arrival times, he can use navigation only.
Route optimization becomes essential as operational complexity increases. An increase in fleets brings about interdependent routing decisions, delivery promises to customers must be accurately scheduled, there are labor laws and regional regulations that limit the availability of drivers, and increased fuel and labor expenses exert a squeeze on cost per stop. Under such circumstances, manual planning and navigation-only tools cannot scale, and optimization software will be a fundamental part of ensuring efficiency, compliance, and service reliability.
Example: A last-mile operation handling hundreds of daily stops across multiple depots requires optimization to remain profitable and compliant while meeting customer SLAs.
The above analysis leads to a single conclusion: mapping APIs are not automatically optimizing routes due to the lack of design to determine the delivery planning. They are efficient in the implementation of routes that are already in place. The moment delivery operations require decisions about stop assignment, workload distribution, constraint satisfaction, and compliance, navigation alone becomes insufficient.
This is precisely the gap that NextBillion.ai addresses.
API mapping provides an answer to the question of how to drive between places. NextBillion.ai provides answers to the question whether there is a route to be served, what vehicle should serve, which stops in which sequence, and at which time. It works prior to navigation, whereby delivery requirements, constraints, and business rules are transformed into executable route plans prior to the commencement of navigation by any driver.
In the initial phases of development of the delivery business, it seems that the routes created with the help of mapping APIs are optimized due to the low density of stops and the possibility of managing the constraints manually. The illusion is lost as the volumes increase. NextBillion.ai does not perpetuate this illusion by explicitly optimizing by considering feasibility, trade-offs, and fleet-wide impacts instead of assuming the validity of routes.
NextBillion.ai schedules vehicles, depots, drivers, time windows, and policies in parallel, where mapping APIs handle each route separately. The capacity constraints, service time, delivery priorities, and labor regulations are implemented in the planning phase and not rectified in the implementation phase. This guarantees routes that have been exchanged with navigation are already valid, compliant, and balanced.
NextBillion.ai is not a substitute for mapping APIs. It relies on them. The routes obtained after the optimization process are implemented with the help of navigation services like Google Maps, Mapbox, or HERE Technologies. Navigation deals with turn-by-turn directions and real-time traffic reaction. NextBillion.ai upholds planning integrity throughout the process.
Mapping APIs are not automatic route optimizers, as optimization is a planning feature and not a navigation feature. NextBillion.ai is created to address this issue of planning by simplifying the delivery process into manageable, organized, and scalable route plans that can be implemented through the navigation tools with high efficiency.
In short, mapping APIs draw the fastest lines on a map. NextBillion.ai decides which lines should be drawn in the first place.
Mapping APIs excel at navigation, but they do not perform true route optimization. As delivery operations scale, planning decisions around capacity, time windows, compliance, and fleet coordination become critical. Optimization is a system-level planning problem that must be solved before navigation begins. Without dedicated optimization, efficiency gains plateau and operational risk increases. See how NextBillion.ai transforms delivery planning into scalable, compliant, and executable routes by adding true optimization intelligence on top of navigation. Connect with us to know more.
No. Mapping APIs calculate driving paths and ETAs but do not make planning decisions about stop assignment, feasibility, or fleet-wide efficiency.
Because routing is handled independently per vehicle, without accounting for shared capacity, time windows, or driver and fleet constraints.
No. Multi-stop routing sequences destinations but does not resolve constraints, validate feasibility, or balance workload across vehicles.
They cannot. Labor laws, service-level commitments, and operational policies must be enforced outside navigation systems.
A dedicated route optimization engine like NextBillion.ai, which designs feasible, compliant routes before navigation begins.
Bhavisha Bhatia is a Computer Science graduate with a passion for writing technical blogs that make complex technical concepts engaging and easy to understand. She is intrigued by the technological developments shaping the course of the world and the beautiful nature around us.